Optimal control and HamPath
Let consider a simple optimal control problem with ")

![\left\{ \begin{array}{l} \displaystyle J(u(\cdot)) = \frac{1}{2} \int_{0}^{1}u(t)^2 \mathrm{d}\, t \longrightarrow \min \\[1.0em] \displaystyle \dot{x}(t) = v(t), \\ \displaystyle \dot{v}(t) = -\lambda v(t)^2+u(t), \quad u(t) \in \mathbb{R}, \quad t \in [0,1] \text{ a.e.}, \\[1.0em] \displaystyle x(0) = -1, \quad x(1) = 0, \\ \displaystyle v(0) = \phantom{-}0, \quad v(1) = 0, \end{array} \right.](http://s0.wp.com/latex.php?latex=%5Cleft%5C%7B++%5Cbegin%7Barray%7D%7Bl%7D++%5Cdisplaystyle+J%28u%28%5Ccdot%29%29+%3D+%5Cfrac%7B1%7D%7B2%7D+%5Cint_%7B0%7D%5E%7B1%7Du%28t%29%5E2+%5Cmathrm%7Bd%7D%5C%2C+t+%5Clongrightarrow+%5Cmin+%5C%5C%5B1.0em%5D++%5Cdisplaystyle+%5Cdot%7Bx%7D%28t%29+%3D+v%28t%29%2C+%5C%5C++%5Cdisplaystyle+%5Cdot%7Bv%7D%28t%29+%3D+-%5Clambda+v%28t%29%5E2%2Bu%28t%29%2C+%5Cquad+u%28t%29+%5Cin+%5Cmathbb%7BR%7D%2C+%5Cquad+t+%5Cin+%5B0%2C1%5D+%5Ctext%7B+a.e.%7D%2C+%5C%5C%5B1.0em%5D++%5Cdisplaystyle+x%280%29+%3D+-1%2C+%5Cquad+x%281%29+%3D+0%2C+%5C%5C++%5Cdisplaystyle+v%280%29+%3D+%5Cphantom%7B-%7D0%2C+%5Cquad+v%281%29+%3D+0%2C++%5Cend%7Barray%7D++%5Cright.++&bg=ffffff&fg=000&s=0 "\left\{ \begin{array}{l} \displaystyle J(u(\cdot)) = \frac{1}{2} \int_{0}^{1}u(t)^2 \mathrm{d}\, t \longrightarrow \min \\[1.0em] \displaystyle \dot{x}(t) = v(t), \\ \displaystyle \dot{v}(t) = -\lambda v(t)^2+u(t), \quad u(t) \in \mathbb{R}, \quad t \in [0,1] \text{ a.e.}, \\[1.0em] \displaystyle x(0) = -1, \quad x(1) = 0, \\ \displaystyle v(0) = \phantom{-}0, \quad v(1) = 0, \end{array} \right.")
where the initial and final times are fixed (

 = (-1,0)")
 = (0,0)")
 & \longmapsto & \displaystyle H_\lambda(q,p,u) := p_{x} v + p_{v} (-\lambda v^2 + u) + \frac{1}{2} p^0 u^2, \end{array}")
with 
")

")
 := (q(\cdot),p(\cdot))")
 = \vec{h_\lambda}(z(t))")
with
Definition 1 (Maximized Hamiltonian).
 := H_\lambda(z,\bar{u}(z)) = p_{x} v + p_{v} (-\lambda v^2 + \bar{u}(z)) - \frac{1}{2}\bar{u}^2(z),")
the maximized (or true) Hamiltonian, where the optimal control is
 = p_{v} = \mathrm{argmax}_{u \in \mathbb{R}} H_\lambda(z,u)")
and where the Hamiltonian system is given by
 = \left(\frac{\partial h_\lambda}{\partial p}(z), -\frac{\partial h_\lambda}{\partial q}(z)\right).")
Definition 2 (Exponential mapping). For fixed 

")
 \mapsto \exp(t\, \vec{h_\lambda}) (z_0)")
")


![[0,t]](http://s0.wp.com/latex.php?latex=%5B0%2Ct%5D&bg=ffffff&fg=000&s=0 "[0,t]")
 = z_0")
The minimizing curves
Definition 3 (Shooting function).
 := \Pi_{q}( \exp((t_f-t_0)\, \vec{h_\lambda})(q_0,y)) - q_{f}, \end{array}")
where 
 = q")
The simple shooting method consists in finding a zero of the simple shooting function 
 = 0.")
Remark 4.  := S_\lambda(y)")
 = 0")
![[0,1]](http://s0.wp.com/latex.php?latex=%5B0%2C1%5D&bg=ffffff&fg=000&s=0 "[0,1]")
If we note  := \Pi_{q}( \exp(t\, \vec{h_\lambda})(q_0,p_0))")
")


")
")
Definition 5 (Jacobi field). The differential equation on ![[0,t_f]](http://s0.wp.com/latex.php?latex=%5B0%2Ct_f%5D&bg=ffffff&fg=000&s=0 "[0,t_f]")
 = \mathrm{d} \vec{h} (z(t)) \cdot \delta z(t)")
is called a Jacobi equation, or variational system, along the extremal ")
 =: \exp(t\, \mathrm{d}\vec{h}|_{z(\cdot)})(J(0)).")
As a conclusion, it comes that if
 = \Pi_{q}\circ \exp(t_c\, \mathrm{d}\vec{h_{\lambda}} |_{z(\cdot,q_0,p_0)})(\delta z_0), \quad \delta z_0 = \begin{bmatrix} 0_n \\ I_n \end{bmatrix},")
is not of full rank 
Summary of HamPath possibilities.
The idea of HamPath is to produce a collection of numerical functions in order to solve general optimal control problems. The user must only implement the maximized Hamiltonian (definition 1) and the shooting function (definition 3). The different numerical functions can be used to:
- compute the solutions of the exponential mapping (definition 2);
- solve the shooting equations (definition 3);
- compute the set of zeros of a homotopic function (remark 4);
- compute the Jacobi fields (definition 5) and check if there exists any conjugate points.
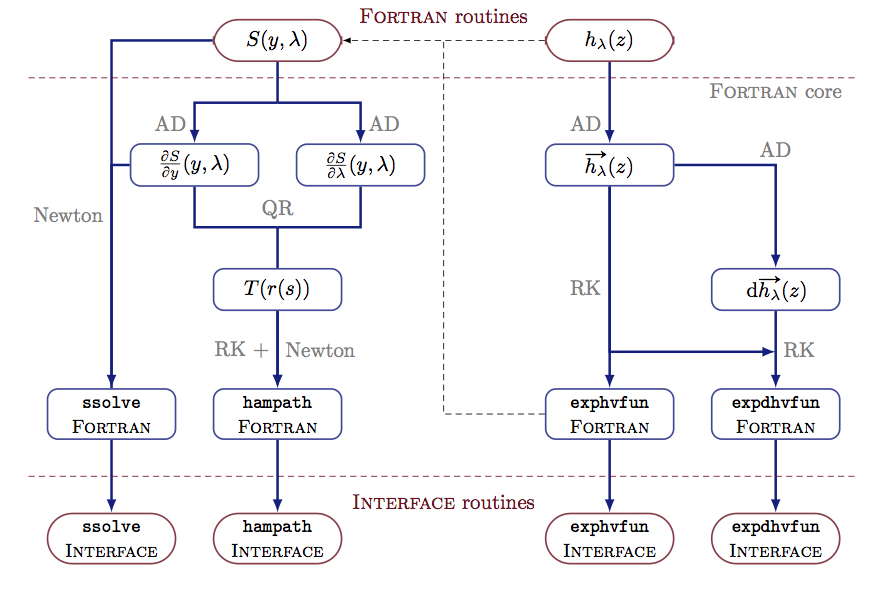
Schematic view of HamPath.
At the bottom of the following figure, the part below the doted lines is a fragment of the outputs of HamPath which is in the language chosen during the installation: it may be chosen among Fortran, Python, Matlab (only) or both Matlab and Octave. AD stands for Automatic Differentiation, RK for Runge-Kutta integrators used to solve ordinary differential equations, Newton for Newton-type methods to solve non-linear equations and QR for QR factorization.